
Según nos adentramos en el mundo de la electrónica necesitamos hacer nuestros proyectos más vistosos. Nuestros familiares y amigos no comprenden que dentro de un chip se esté ejecutando un algoritmo de cálculo de máximo, ordenación por burbuja o una resolución compleja de algún problema. Es cuando decidimos que necesitamos mover cosas.
Como describimos en la introducción en este artículo, hablaremos de un circuito básico para excitar motores, el “L293”. Primero debemos saber qué es un motor. Hay cientos de páginas donde se describe a la perfección los tipos de motores y su morfología, por lo que aquí no los describiremos. Pero existe un nexo en común entre todos los motores; tanto motores paso a paso, motores de continua, de alterna, brushless, servos… Todos ellos están formados por bobinas. La morfología cambia de unos a otros en ocasiones enormemente, pero para conseguir que cualquiera de ellos se mueva habrá que excitar dichas bobinas.
El circuito del que hablaremos en este artículo describe cómo funciona un puente H. Nos vamos a adentrar en el mundo de la electrónica de potencia. Esta es una rama completa de la electrónica y una de las más complicadas. Aquí solo describiremos unos cuantos detalles básicos del circuito. También hablaremos de dos tipos básicos de motores, los motores de continua (como los que encontramos en los juguetes) y motores paso a paso.
Primeros pasos. ¿Dónde conseguir motores?
En las tiendas de electrónica suelen tener motores de continua como los de los juguetes. Estos motores son muy comunes e incluso los tienen en alguna ferretería. Pero como es muy lógico y mucho más divertido se encuentra en los juguetes de los niños. Todo el mundo tiene o puede conseguir algún juguete que esté medio escacharrado del que poder quitarle el motor. Además, seguro que puedes conseguir algún elemento más. Otro sitio de donde sacar motes de continua es de las lectoras de CD/DVD. El motor que saca la bandeja es un motor de continua. En las tiendas de informática no suelen poner muchos reparos para dar las lectoras estropeadas que retiran de los ordenadores.
Si queremos un motor de continua con un poco más potente la cosa se complica más. Muchas veces las tiendas de electrónica no los tienen. Este es el momento de recurrir a páginas de subastas o a buscar directamente por internet.
Nosotros solemos tener otra fuente para este tipo de motores: las impresoras. Las impresoras suelen llevar entre 3 y 4 motores. Casi siempre alguno es de continua aunque normalmente son paso a paso. De hecho es de aquí de donde sacamos la mayoría de los motores paso a paso de nuestros proyectos. La mayoría de los motores paso a paso que encontramos son bipolares, pero aun así también nos hemos encontrado con algún unipolar. En este caso solemos descartar el terminal intermedio de la bobina y usarlos como bipolares.
¿Cómo escoger el motor? ¿Qué parámetros debemos tener en cuenta?
Para escoger un motor el parámetro que más nos va a limitar es el par que el motor es capaz de suministrar $(T)$ y la velocidad angular del mismo $(W)$. Normalmente viene expresado en Newton metro $(Nm)$ o algún múltiplo o submúltiplo, y en revoluciones por minuto $(rpm)$. Los motores de continua suelen ser muy revolucionados, es decir giran a muchas $rpm$ dando poco par motor, por eso suelen llevar cajas reductoras. Con las cajas de reducción de velocidad podemos reducir las revoluciones y aumentar el par en una relación directa. Como de un transformador se tratase pero en vez de tensión y corriente con velocidad y par.
$$V_1 \cdot I_1 = V_2 \cdot I_2$$
$$n = \frac{V_1}{V_2} = \frac{I_2}{I_1}$$
$$W_1 \cdot T_1 = W_2 \cdot T_2$$
$$n = \frac{W_1}{W_2} = \frac{T_2}{T_1}$$
$n$: relación de la reducción
Si aprovechas los motores de las lectoras CD/DVD podemos aprovechar la caja reductora que tiene este motor para abrir la bandeja, además suelen abrir sobre 10cm en 1 o 2 segundos. Lo cual es una buena velocidad para un robotito o algún otro movimiento que queramos hacer. No es demasiado brusco, ni demasiado lento. Lo complicado suele ser encontrar dos lectoras iguales en caso de necesitar más de una unidad.
En el caso de aprovechar los motores de un juguete podemos seguir la misma política, aprovechar la reducción que traen. Siguiendo con el problema de conseguir múltiples unidades.
Si tienes suerte de que en tu tienda de electrónica o ferretería tienen de estos tipos de motores pregunta si tiene también cajas reductoras para estos también. Suelen venderlas en kits que acoplan perfectamente con el motor y con distintos tipos de reducción.
En el caso de motores paso a paso podemos regular las rampas de arranque. Además, al moverse de paso en paso estos tiene más fuerza, por lo que no suele ser necesario la caja reductora. Al igual que antes, el parámetro más importante es el par motor. En este caso no suele venir reflejada la velocidad del mismo, ya que depende de la velocidad con la que se den los pulsos. Como dato sobre la velocidad hay que tener en cuenta que el motor que hace girar el CD/DVD o el plato de un disco duro son motores paso a paso y en este caso estos motores son capaces de alcanzar altas velocidades.
Otro parámetro a tener en cuenta en los motores es la tensión que soportan. En el caso de los motores paso a paso la tensión y la corriente (es decir la potencia o el consumo) vienen estrechamente relacionadas. Como en un transformador. Si los alimentamos a poca tensión consumirá mucha corriente para conseguir el movimiento. En estos motores es buena idea alimentaros a una tensión elevada. Esta tensión no viene dada por la morfología del motor ni por la sección del cable. En estos motores la tensión máxima viene dada por el barniz del cable del bobinado y suele ser de unos cientos de voltios sobre 100V o 200 V por lo que esta tensión no suele ser problema. En este caso el límite lo marca la tensión que es capaz de manejar el chip. Nuestro consejo: acercaros a ella pero procurar no sobrepasarla, así conseguiréis que el motor consuma menos corriente. Otro detalle sobe el barniz es que soporta sobre 70ºC, después arde. Este calentamiento suele producirse cuando tenemos el motor reteniendo una posición. Al tratarse de motores paso a paso es casi imposible el evitar retener una posición, de echo solemos usar estos motores con este fin. Aun así, si no sois capaces de tocar el motor os estáis pasando. Aflojar un poso las exigencias que le tenéis a ese motor. Tener en cuenta que si tocáis un motor que este sobre 70ºC probablemente os queméis y si lo tocáis con la yema del dedo os quedareis unos días sin huella dactilar.
En todo el campo de la electrónica de potencia la corriente es el enemigo a batir. Manejar mucha tensión es peligroso por si recibimos una descarga, pero la corriente es la que nos va a fastidiar. Mucha corriente es la que nos puede matar además de que producirá que los elementos se calienten y que haya que usar secciones de cable mayores. Cuando trabajemos con motores, siempre que podamos trabajaremos con tensiones elevadas para producir que la corriente nos disminuya. Obviamente si el motor es muy grande vamos a tener mucha tensión, mucha corriente y mucho par motor en estos casos debemos extremar las precauciones, ya que son muchos los elementos que nos pueden causar daño.
¿Cómo funciona un puente H?
Un puente H tiene básicamente la estructura mostrada en el esquema.
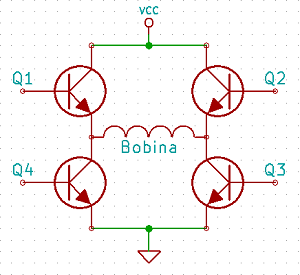
Como podemos ver se trata de cuatro transistores con los que podremos controlar si el extremo de la bobina se conecta a tensión o a tierra. Parece sencillo y os preguntareis por qué usar un chip para esto, si podemos hacerlo con cuatro transistores adaptándolos a la potencia que necesitemos. Pues bien, sí parece sencillo, pero si analizáis el circuito con un poco de detenimiento veréis que polarizar los transistores uno y dos no es tan sencillo. Ya que no tiene referencia de tierra. Para polarizar este transistor se pueden hacer múltiples circuitos de polarización basados en bombas de carga. Pero esto es un tema demasiado extenso para tratar en este artículo. En el caso de que lo queráis hacer es un circuito así desde cero os desanimo. Si queréis usar transistores más grandes por algún motivo, existen ciertos chips que sirven para hacer la polarización de estos transistores simplificando enormemente esta labor.
Retomando el tema de las polarizaciones de la bobina, con el esquema antes mostrado, si conectamos los transistores pares polarizamos la bobina en un sentido, mientas que si polarizamos los impares, la polarización será en sentido opuesto. De esta forma tan sencilla conseguimos que un motor de continua gire en los dos sentidos. En el caso de un motor paso a paso (bipolar) con dos grupos de este montaje nos permitirá polarizar sus dos bobinas.
Para mover un motor paso a paso habrá que seguir la secuencia correcta de polarización de las bobinas. No la vamos a describir en este artículo porque se puede consultar en infinidad de páginas. Pero citar que con este montaje podremos mover el motor en sus dos modalidades básicas paso completo y medios pasos.
El chip que usamos para esta placa, el L293, tiene un problema: algunas de sus versiones no incluye los diodos de freewheeling (también llamados flyback, snubber, clamp, suppressor, etc; tienen infinidad de nombres). Son unos diodos que se deben poner en anti-paralelo con la bobina para que las corrientes generadas en las conmutaciones de la bobina no afecten al circuito. Con anti-paralelo lo que queremos decir es que deben estar polarizados en inversa. El diodo lo polarizara en directa las corrientes generadas en las conmutaciones de las bobinas. El montaje de los transistores de salida queda así.
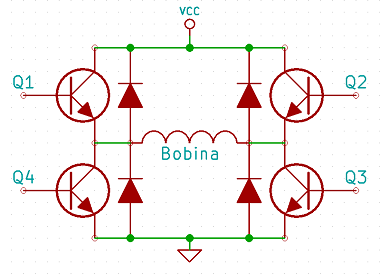
En nuestro montaje, aunque usamos un L293 con estos diodos, decidimos colocar unos diodos externos extra. Como coinciden en configuración, usamos un puente de diodos con este fin. Aunque no es lo más recomendable, ya que lo suyo sería poner unos diodos de recuperación rápida o Schottky. En nuestro caso, como nuestro L293 ya tiene los diodos integrados, los diodos del puente solo están como refuerzo, para absorber los grandes picos de corriente que no puedan aguatar los diodos integrados, por lo que no nos afectará que estos respondan un poco más lento.
Conclusión
Como en la mayoría de nuestros artículos, tenemos una placa lista para ser conectada a uno de nuestros microcontroladores. Esta placa está basada en el popular circuito L293 como ya hemos dicho a lo largo del artículo. Este chip consta de 2 puentes H completos totalmente controlables. Permite controlar un motor paso a paso (PAP) de 2 bobinas o 2 motores de continua. Ideal para adentrarnos en el mundo de la electrónica de potencia, realizar algún robot sencillito o practicar con motores paso a paso.
Esta placa está dotada de un conector de alimentación externo, ya que hay motores que consumen más corriente en algunos instantes, y este consumo excesivo puede causar un reset del microcontrolador debido a una caída de tensión. Además, algunos motores PAP necesitan tensiones elevadas para funcionar correctamente. Por estos motivos se optó por una alimentación externa y no desde la placa como de costumbre.
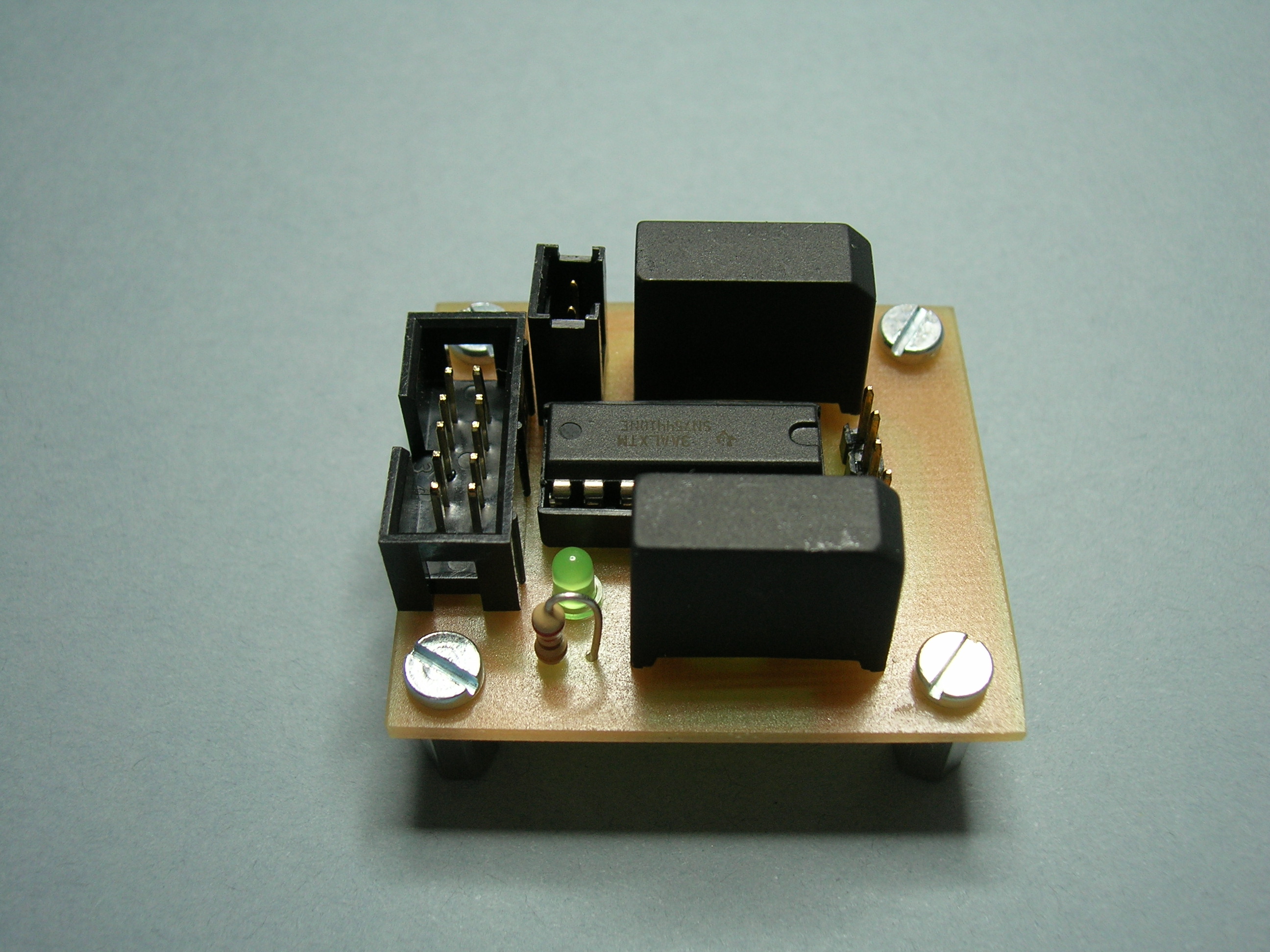
Foto 1: Placa terminada
Documentos
- Escrito por Lemac
- Creado: 14 Enero 2014