
En este artículo se describe la mecánica de una máquina de control numérico realizada como proyecto final de carrera.
Puesto que poner aquí toda la memoria del diseño de la máquina no tendría mucho sentido, está dividida en varios artículos que describen unos cuantos detalles de la misma. En este artículo se trata, en concreto, la mecánica.
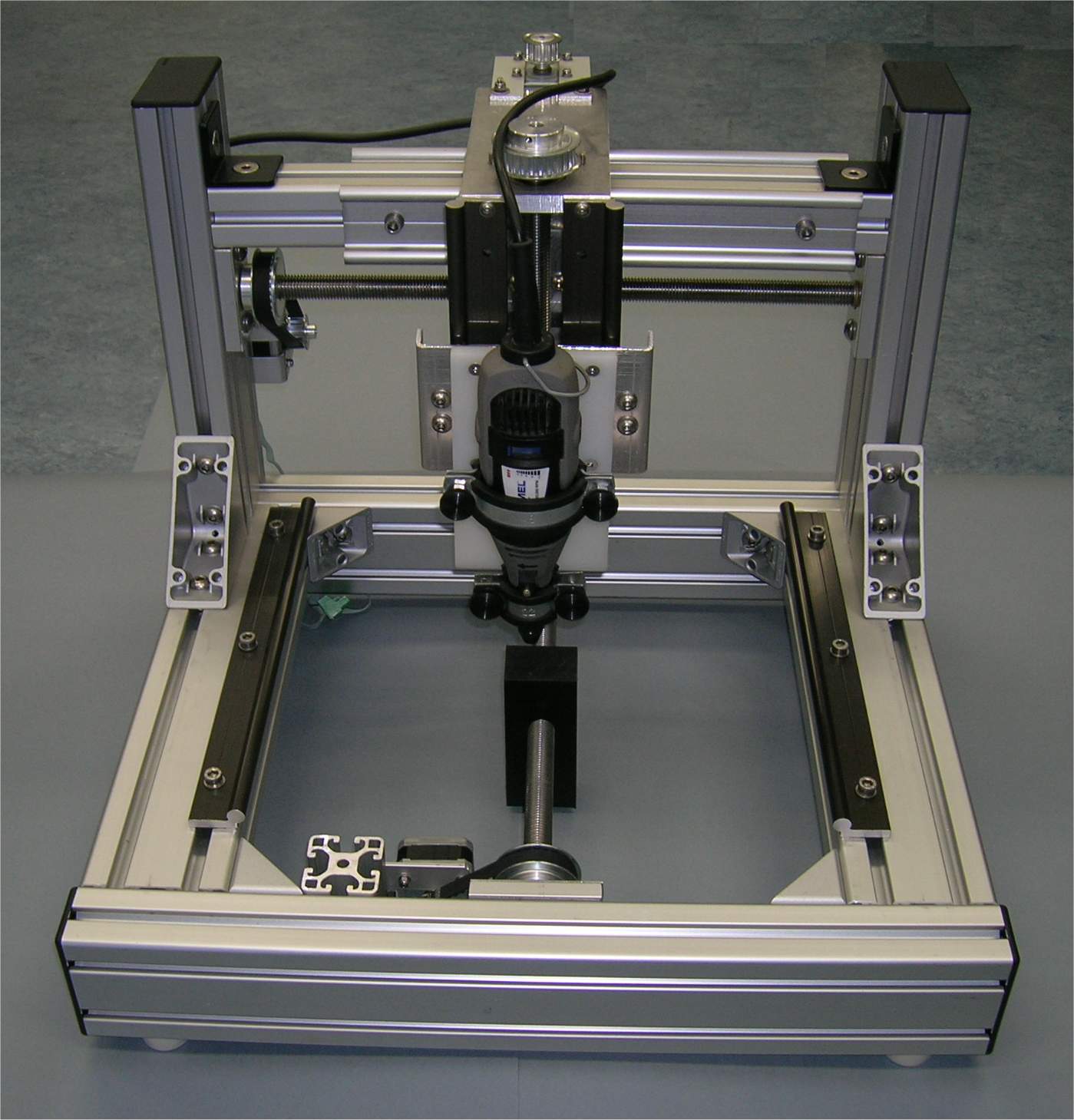
Foto 1: Máquina terminada
Características físicas
Las dimensiones de la máquina son de $50 cm$ x $50 cm$ x $50 cm$ en reposo. El eje Y puede volar hacia los lados alcanzando un volumen máximo de $70 cm$ en esa dimensión. Su peso es de alrededor de $12 kg$.
Motores
La máquina está dotada de 3 motores paso a paso de $110 N \cdot cm$ (NE23a110) de 200 pasos por vuelta. Inicialmente había pensado en el uso de motores de impresora. Tras las primeras pruebas, aunque estos eran capaces de mover la máquina, no estaban muy holgados de par, puesto que la máquina se podía detener con muy poca fuerza. Por este motivo se optó por comprar estos motores.
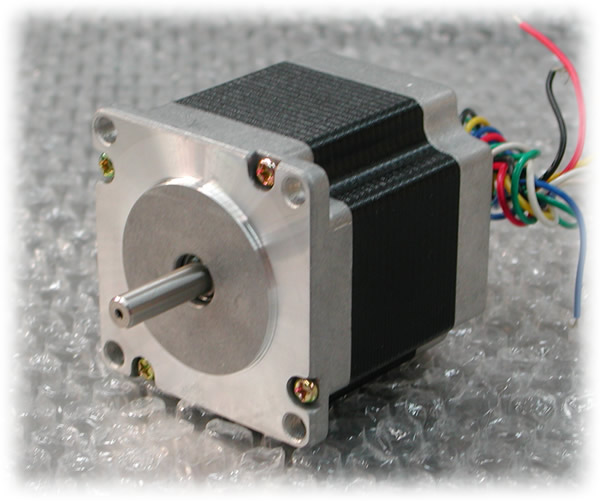
Foto 2: Motores paso a paso
Inicialmente realizamos una electrónica de control con un L297 y un L298 como se explica en el artículo Controlador de mototres PAP con L297 y L298. A la hora de adquirir los motores nos recomendaron los controladores (CNT145), los cuales también adquirimos. Aunque antes de cambiarlo todo probamos los nuevos motores con la electrónica diseñada y funcionaba perfectamente, estos nuevos controladores ofrecían una serie de ventajas. Mientras que la placa con L298 y L297 permitía avances de motor de paso completo y de medios pasos, la nueva electrónica dejaba realizar una división en cada paso pudiendo dividir cada paso en 8 (microstepping), dando esto mucha más resolución, alcanzando a dar 1600 pasos por vuelta.
Transmisiones
La conversión de movimiento angular en lineal, para accionar la máquina, fue hecha mediante una transmisión por husillo (tornillo de potencia). Está realizada mediante un husillo de acero inoxidable y una tuerca de nylatron.
El husillo: se trata de una varilla roscada normal de M16 de acero inoxidable A2. Se escogió una varilla normal M16 por economizar ya que en realidad lo más óptimo sería usar un tornillo de rosca cuadrada, ya que es el tornillo que menos efecto de auto-retención tiene. Sin embargo, al tener un husillo de rosca triangular de ángulo 30º, el efecto de auto-retención es elevado. Hay que tener en cuenta que los tornillos están pensados para apretar y retener el apriete, por eso no es lo más indicado para esta aplicación, pero es barato. Escogimos M16 por que tiene un avance de 2mm por revolución lo cual me favorecía a la hora de hacer los cálculos y de acero inoxidable por el acabado superficial del mismo. Para que la superficie de éste fuera muy lisa y no degastase la tuerca por efecto lija, como podría suceder con un tornillo zincado o similar.
La tuerca: utilizamos un taco de nylatron (nylon con grafito infiltrado) al cual realizamos un taladro y un roscado. Esto permitió tener una tuerca con la forma que necesitase para favorecer el amarre de lo que se quisiera mover. Como sistema anti-holguras en la tuerca hay muchas opciones: nosotros simplemente optamos por hacer una tuerca de gran número de filetes, garantizando así que siempre haya filetes en contacto y que no existan holguras. Esto funcionó, pero con el tiempo las tuercas se degastarán y cogerán holguras, entonces será cuando le practicaremos un corte a la tuerca, de manera que la zona roscada quede dividida en dos. Posteriormente pondremos un muelle para que este haga presión a las dos partes separadas y elimine la holgura de la misma. El nylatron, al tener grafito infiltrado, tiene un par de ventajas extras. Al tratarse el grafito de un lubricante seco natural, no hace falta lubricar el husillo ya que el desgaste del mismo producirá su auto-lubricación. Al mismo tiempo, es un material más blando que el acero inoxidable por lo que el desgaste siempre se producirá en la tuerca y nunca en el husillo. Aun así, para reducir la fricción engrasamos los husillos para evitar el desgaste de la tuerca e impedir, en la medida de lo posible, la aparición de holguras.
Para la unión ente el motor y el husillo se barajaron múltiples opciones. Están todas en este artículo. Finalmente se optó por el uso de poleas síncronas. Esto garantiza que el movimiento del motor y del husillo vayan sincronizados, además de permitir hacer una reducción en este caso de 1 es a 2, es decir, hay que dar dos vueltas de motor para dar una al husillo. Así, cada vuelta de motor el husillo avanza un 1mm. El sistema de acople por polea es silencioso, no necesita lubricación y aísla eléctricamente, por lo que lo vuelve el sistema óptimo.

Foto 3: Poleas y correas
En este punto podemos hacer un pequeño cálculo de resolución de movimiento.
Husillo: $\frac{2 mm}{rev}$
Poleas: reducción $\frac{1 rev}{2 rev}$
Motor: $\frac{200 pasos}{rev}$
Esto supone que cada paso avanza $\frac{2 mm}{2 rev} \cdot \frac{1 rev}{200 pasos} = 5 ^{\mu m}/_{paso}$
Gracias a la electrónica podemos dividir cada paso en 2, 4 u 8 dando unas resoluciones de $0.0025 mm (2.5 \mu m)$, $0.00125 mm (1.25 \mu m)$ y $0.000625mm (0.625 \mu m = 625 nm)$.
La estructura
La estructura de la máquina está realizada en su totalidad con perfilería industrial de aluminio de marca Item.

Foto 4: Perfil de aluminio Item
Para evitar desgaste de la tuerca debido a esfuerzos innecesarios, se buscó que las partes móviles reposen su peso sobre guías lineales. Estas guías soportan el peso de las partes móviles y, de esta manera, el husillo sólo debe vencer la fuerza de rozamiento. Como guías lineales se usaron guías Igus Drylin W. Escogimos estas debido a su bajo coste, pero presentan bastantes holguras, por lo que no son muy recomendables. Estas guías tienen también unas juntas de fricción autolubricantes, lo que permite eliminar el uso de grasa.
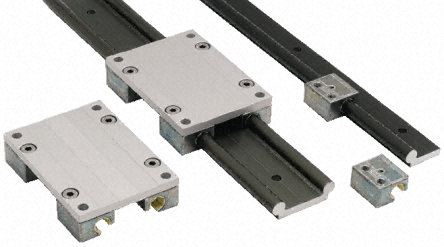
Foto 5: Guías Igus Drylin W
Montaje
El proceso de diseño y montado fue siguiendo una serie de pasos.
Ahí van paso a paso los diseños y el montaje resultante:
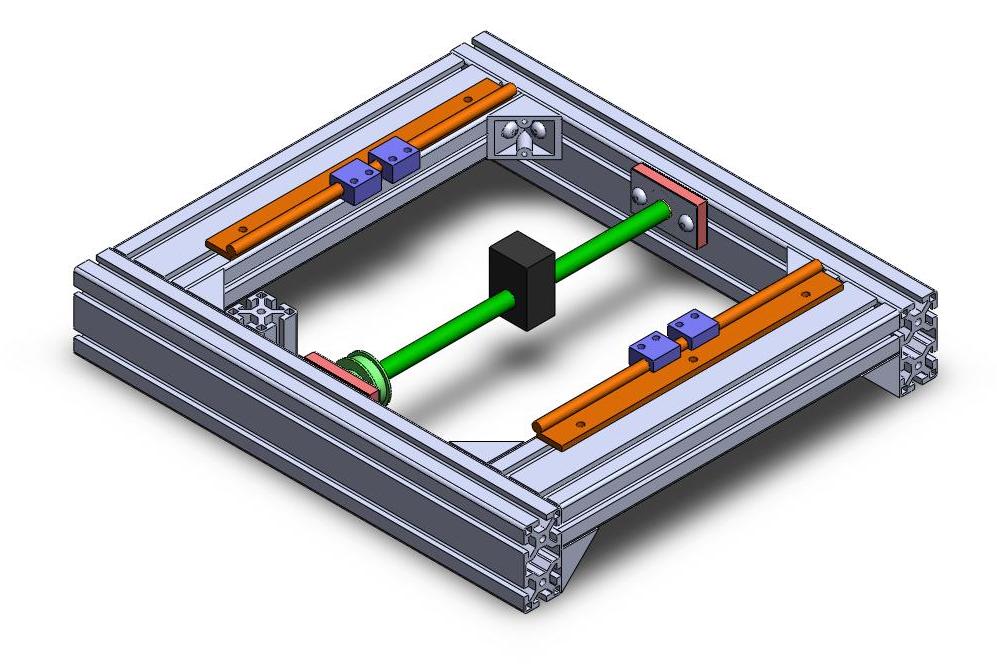
Eje Y vista render
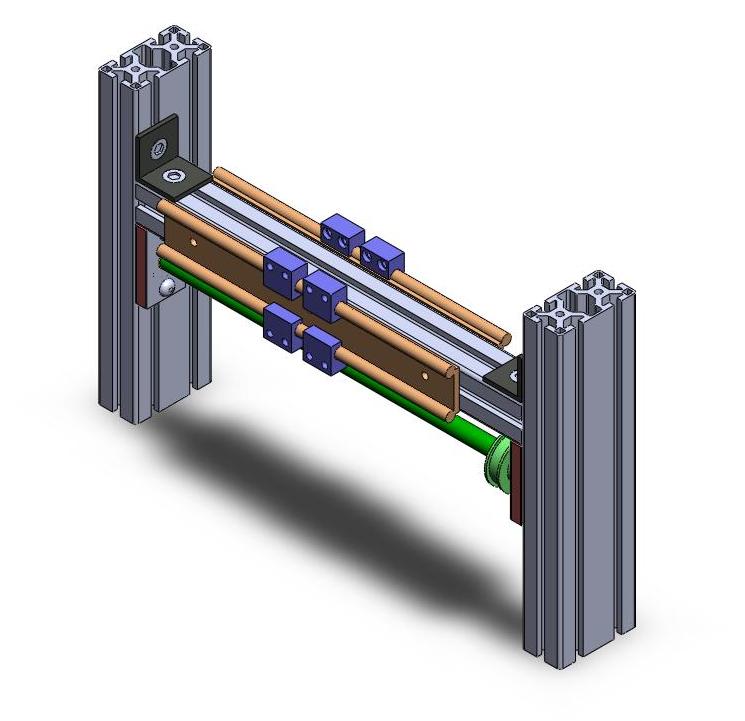
Eje X vista render
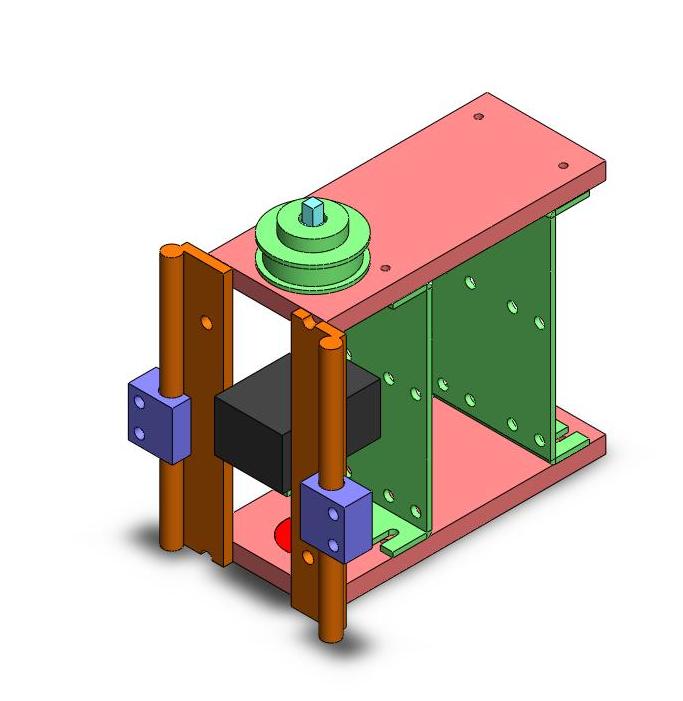
Eje Z vista render
Tras todo esto os dejamos unas fotos y los archivos en SolidWorks de la estructura por si queréis sacar alguna idea. En otros artículos trataremos el tema del control.
Documentos
- Escrito por Lemac
- Creado: 07 Enero 2014